








施設に agv を追加するための明確な道筋が必要です。 無人搬送車は 実証済みの結果をもたらしており、米国の倉庫の 35% 以上がすでに AGV を使用しており、世界中の大規模物流ハブの 80% 以上がロボット自動化を採用しています。生産性の向上、安全性の向上、人件費の削減などのメリットが期待できます。 AGV は危険な環境に適応し、長時間の稼働を実現し、スケーラブルな自動化をサポートします。慎重な計画、堅牢な統合、スタッフのトレーニングにより、AGV の利点を最大限に実現できます。
agv の一般的な利点:
精度と効率の向上
センサーによる安全性の向上
エラー率の低減
まず、施設のニーズ、ワークフロー、安全基準を評価して、AGV 統合の準備が整っているかどうかを確認します。
信頼性が高く効率的な操作を実現するために、タスクや環境に適した適切な AGV のタイプとナビゲーション方法を選択してください。
スムーズで安全な AGV の移動をサポートするために、明確なナビゲーションレーン、マークされた通路、安全ゾーンを備えた施設レイアウトを準備します。
ミドルウェアと安全なデータ フローを使用して AGV を倉庫システムと統合し、タスクの管理と調整を最適化します。
AGV の操作と安全性についてスタッフを徹底的にトレーニングし、パフォーマンスを継続的に監視して効率を向上させ、安全性を維持します。
評価は、現在の業務および物流要件に関する詳細な情報を収集することから始める必要があります。すべての関係者間のコミュニケーションが重要です。物流管理者、メンテナンス チーム、IT スタッフを巻き込んで、AGV の追加による影響を全員が理解できるようにします。建物のメンテナンス、インフラストラクチャ、IT システムをチェックして、施設の準備状況を評価します。自動化中の予期せぬ問題を回避するために、財務リスクや運用リスクを含むリスク管理戦略を評価します。
ヒント: 施設が ANSI/RIA R 15.08 などの安全規格に準拠していることを確認してください。障害物に対するAGVの反応、衝突回避、電磁両立性をテストして、安全な操作を確保します。
既存のワークフローを確認して、無人搬送車で自動化できるタスクを特定します。反復的な材料の移動、安定した荷物の定期的な配送、および時間通りの配送と追跡が必要な作業に焦点を当てます。以下の表は、さまざまな業界における agv の一般的なアプリケーションを示しています。
施設タスクのカテゴリ |
説明と例 |
|---|---|
パレットハンドリング |
製造および流通施設におけるパレットの積み込み、積み下ろし、積み重ね、および輸送。 |
進行中の移動 |
未完成の材料を生産段階間、または倉庫から生産ラインに移動する。 |
トレーラーの積み込み |
出荷のためにトレーラーに商品を積み込む作業で、多くの場合、ベルトコンベアやリフトが使用されます。 |
原材料の取り扱い |
原材料を受け入れから生産ラインに移動します。 |
完成品の取り扱い |
完成品を製造から保管または出荷まで移動すること。 |
ロールの取り扱い |
製紙工場、印刷工場、鉄鋼メーカーでのロールの輸送と積み重ね。 |
コンテナの取り扱い |
港湾ターミナルでの海上コンテナの移動。 |
カートおよびトレーラーの牽引/牽引 |
牽引 AGV を使用してカートやトレーラーを牽引し、複数の小さな荷物を移動します。 |
離散イベント シミュレーションまたは効率評価ツールを使用して、AGV が施設にどのような影響を与えるかをモデル化します。効率的なマテリアル フローと生産性をサポートするために、ASRS および自動保管および回収システムがどのように AGV と連携するかを検討してください。
agv プロジェクトに明確で測定可能な目標を設定します。スループット、省力化、投資収益率、キャッシュ フロー、生産性、品質、精度、一貫性、信頼性、従業員満足度などの主要業績評価指標 (KPI) を定義します。テレマティクスと倉庫管理システムを使用して、これらの指標を追跡します。定期的にビジネス ケースを見直し、自動化プロジェクトの進化に合わせて目標を更新します。
注: スタッフと技術者に対するトレーニングと技術教育は、スムーズな運用と長期的な成功のために不可欠です。
これらの手順に従うことで、施設が agv に対応できるようになり、自動化プロジェクトが最大限の効率と価値を提供できるようになります。
無人搬送車システムを設計するには、施設に適した agv タイプ、ナビゲーション方法、カスタム機能を選択する必要があります。慎重に計画を立てることで、AGV が業務の効率と信頼性を最大限に高めることができます。
それぞれが特定のタスクや環境向けに設計された、いくつかの agv タイプから選択できます。以下の表は、最も一般的なタイプをまとめたものです。 無人搬送車: 産業環境で使用される
AGVタイプ |
説明 |
産業上の例 |
|---|---|---|
ユニットロードAGV |
高度なナビゲーションを使用して、大型の荷物やパレット化された荷物を処理および移動します。製造や倉庫で使用されます。 |
Amazon では、フルフィルメント センターでユニット ローダーを使用してパレットを効率的に移動しています。 |
AGVの牽引 |
重いカートやトレーラーを牽引する無人車両。複数のカートを同時に運ぶことができます。 |
Cyngn の自動タグガーは完成品を移動し、12,000 ~ 20,000 ポンドを牽引します。 |
自動誘導カート (AGC) |
少量の輸送を行うコンパクトな車両。材料の輸送や組立ラインの供給に最適です。 |
ボーイングは航空機製造において AGC を使用して、組立ラインに沿って部品を移動させます。 |
カスタムAGV |
特殊な機能と統合機能を備え、特定のニーズに合わせて設計されたカスタマイズされた AGV。 |
General Motors は、自動車製造において材料配送のために 75 台を超えるカスタム AGV を採用しています。 |
負荷サイズ、ワークフロー、統合のニーズに基づいて agv を選択する必要があります。固定ルートや反復的なタスクの場合、AGV は AMR (自律移動ロボット) よりも予測可能なパフォーマンスを提供します。
ナビゲーション テクノロジーは、AGV が施設内をどのように移動するかを決定します。いくつかの方法から選択できますが、それぞれに独自の長所と制限があります。以下の表は、一般的なナビゲーション システムを比較しています。
ナビゲーション方法 |
正確さ |
信頼性 |
主な利点 |
主な欠点 |
|---|---|---|---|---|
レーザー三角測量(反射板付きLiDAR) |
高精度 |
反射板が適切に取り付けられていれば信頼性が高い |
デジタルルートにより柔軟なフリート管理が可能になります。高精度 |
反射板の設置には時間と費用がかかります。リフレクターのレイアウトが重要 |
磁気(電磁界、磁気ストライプ) |
高精度 |
信頼性が高い。動的な環境変化の影響を受けない |
隠蔽ガイドワイヤー (電磁);比較的低コスト(磁気ストライプ) |
パスのインストールまたは変更は難しく、中断を伴います。磁気ストライプは損傷しやすく、メンテナンスが必要です |
ワイヤー(埋設ワイヤー) |
高精度 |
高い信頼性 |
シンプルで信頼性の高いナビゲーション原理 |
インストールには混乱が伴い、コストがかかります。経路変更にはワイヤの再敷設が必要 |
光学式(ビジョンガイダンス、2Dコード) |
正確な位置決め |
環境に敏感なため信頼性が低い |
柔軟で取り付けが簡単。インフラストラクチャの変更は必要ありません |
照明、地面の質感、環境条件の影響を受けます。コードの定期的なメンテナンスが必要 |
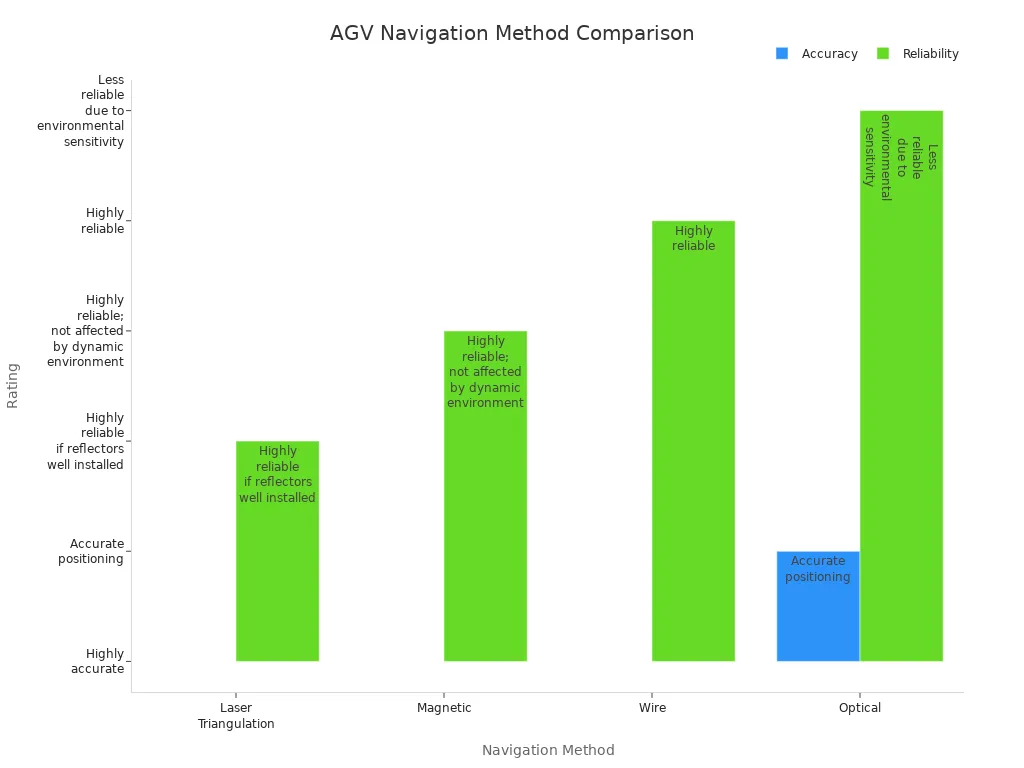
レーザーおよび磁気ナビゲーション方式は高い精度と信頼性を提供するため、固定ルートの asrs や無人搬送車システムに最適です。光学システムには柔軟性がありますが、より多くのメンテナンスが必要になる場合があります。
独自の施設要件に合わせて agv をカスタマイズできます。カスタマイズ オプションには次のものが含まれます。
独自のマテリアルハンドリングのためのシザーリフト、回転装置、ターンテーブルなどの特殊なツール。
レーザー、磁気、視覚誘導システムなどの適応可能なナビゲーション技術。
ワークフローに合わせて負荷容量とAGVサイズを調整可能。
クリーンルームへの適合性や防爆などの業界固有の機能。
ASRS、製造、または組立管理システムとの統合により、同期操作を実現します。
衝突回避、緊急停止、警告灯などの安全機能も充実。
オペレーターのトレーニングを簡素化するユーザーフレンドリーなインターフェイス。
AI、IIoT 統合、環境に優しい電源オプションなどの先進テクノロジー。
ヒント: カスタム agv は、施設の環境と運用目標に合わせて効率、安全性、生産性を最大化するのに役立ちます。
適切な agv タイプ、ナビゲーション方法、カスタマイズに焦点を当てることで、無人搬送車システムが信頼性の高いパフォーマンスを実現し、施設の継続的な改善をサポートできるようになります。

AGV の移動と効率をサポートするように施設を適応させる必要があります。まず、AGV 誘導システムに合わせてナビゲーション レーンを作成します。衝突や交通渋滞を防ぐために、AGV のルートをフォークリフトやその他の機器の経路から分離します。レイアウトを計画する際には、各 AGV の速度と操作性を考慮してください。フロアプランをアップグレードして、AGV パフォーマンスを最適化し、ボトルネックを最小限に抑えます。 agv が独占的に動作できる動作ゾーンを指定し、他の車両からの干渉を軽減します。 AGV のホームベースまたは駐車エリアを確立し、これらのスペースにパレットやコンテナを置かないようにしてください。これらの手順は、AGV の明確な経路を維持し、安全で信頼性の高い操作をサポートするのに役立ちます。
誘導テクノロジーに基づいて、AGV のナビゲーション レーンを作成します。
agv ルートを他の機器から分離します。
動作ゾーンと本拠地を指定します。
フロアプランをアップグレードして、AGV の速度と操作性を高めます。
経路をマーキングすることは、AGV を誘導し、安全を確保するために不可欠です。ご使用の agv ナビゲーション システムと施設環境に適したタイプのフロア テープをお選びください。オプションには、視認性を高める単色のビニール、センサーベースのナビゲーション用の磁気テープ、耐久性を高めるマット仕上げのテープが含まれます。色分けを使用して人間と車両の交通を分離し、明確な経路境界を定義します。破片がAGVセンサーに干渉しないように、マークされた経路を定期的に検査して清掃してください。ナビゲーションの精度を維持するために、損傷したテープ部分を直ちに交換してください。アクセシビリティを確認し、パス リンクを更新することで、ルーティングの問題をトラブルシューティングします。制御エリアを作成して交差点を管理し、行き詰まりや交通渋滞を回避します。
AGV ナビゲーションに適したフロア テープを選択してください。
安全性とルートの識別のために色分けを使用します。
マークされた経路を検査し、維持します。
交差点での交通規制を行います。
ヒント: 安全マーキングと明確な経路定義は、事故を防止し、効率的なAGVの移動をサポートするのに役立ちます。
安全ゾーンを確立すると、作業者と農業機械の両方が保護されます。クリアランスと安全装置の有無に基づいて、AGV 動作ゾーンを分類します。動作ゾーンには少なくとも 0.5 メートルの空間とアクティブな安全装置が必要です。危険ゾーンには速度制限と音声による警告が必要です。制限ゾーンでは、訓練を受けた担当者のアクセスが制限され、緊急停止装置が必要になります。混乱を避けるために、すべてのゾーンをフロアマーク、標識、照明でマークしてください。従業員が安全に通路を離れることができるように、避難経路を含めます。自動運転車に明るい青色 LED などの可視照明を装備して、作業員に警告します。すべての従業員にAGVの安全性について研修し、操業を開始する前に最終監査を実施します。これらの措置により、明確な経路が確保され、農業動物と人間の安全な共存が確保されます。
動作ゾーンを分類します: 動作ゾーン、危険ゾーン、制限ゾーン、密閉ゾーン、および荷重移動。
安全マークや標識でゾーンをマークします。
避難経路と目に見えるAGV照明を提供します。
打ち上げ前にスタッフを訓練し、安全性を監査します。
無人搬送車システムを倉庫管理システム (WMS) およびエンタープライズ リソース プランニング (ERP) プラットフォームに接続する必要があります。この統合により、タスクの場所、ピックアンドプレイスコマンド、スケジュールなどの指示を各 agv に送信できるようになります。ほとんどの agv は API に依存してこれらのシステムと通信し、リアルタイムの調整と効率的なタスク管理を可能にします。多くの AGV サプライヤーは WMS、ERP、または製造実行システム (MES) との緊密な統合を提供していないため、課題が発生する可能性があります。ハードウェア ディストリビュータや一般的な OEM は、多くの場合、ロボットやフリート管理ソフトウェアを提供していますが、完全なシステム統合は行っていません。フルサービスの OEM はエンドツーエンドのソリューションを提供しますが、柔軟性に欠け、コストがかかる場合があります。ミドルウェア ソリューションはこれらのギャップを橋渡しし、AGV、ASRS、およびエンタープライズ システム間のシームレスな通信を可能にします。ミドルウェアはスケーラビリティもサポートしているため、インフラストラクチャを大幅に変更せずに agv を追加できます。
ヒント: ミドルウェアを使用して、資材の移動を在庫管理および生産スケジュールと同期させ、倉庫業務を最適化します。
AGV、ロボット、倉庫システム間のデータ フローがスムーズになるようにする必要があります。 Modbus/TCP と OPC UA などのインターフェイス プロトコルの互換性がない場合、データ同期が中断される可能性があります。 WMS および MES との統合により、自動タスク割り当て、リアルタイムの経路計画、協調ロボット操作が可能になります。入出荷量、原材料の移動、補充など、AGV 管理下にあるすべての倉庫の移動について詳細な設計データを定義する必要があります。複数の部門にまたがる設計承認は、複雑な統合の課題に対処し、コストのかかる中断を回避するのに役立ちます。ダウンタイム データを取得してレポートし、運用上の問題を迅速に特定して解決します。
agv 統合中はシステムとデータを保護することが不可欠です。ミドルウェアはリアルタイム データを管理し、AGV とエンタープライズ システム間のアクセスを制御して、データの整合性とセキュリティを確保します。通信チャネルを保護し、許可された担当者のみにアクセスを制限する必要があります。ソフトウェアを定期的に更新し、システムのアクティビティを監視して、不正なアクセスを防止します。 AGV と自動保管・取り出しシステム、コンベアライン、その他のロボットを統合するには、強力な互換性と正確な制御コマンドの送信が必要です。これらの手順は、施設内で効率的、安全かつインテリジェントな運用を維持するのに役立ちます。
施設に agv を設置してテストするには、慎重な計画と細部への注意が必要です。無人搬送車がスムーズに動作し、既存のシステムと統合され、初日から信頼性の高いパフォーマンスを提供できるようにする必要があります。このセクションでは、セットアップ、パイロット テスト、トラブルシューティングの重要な手順について説明します。
まず、AGV 用の施設とインフラストラクチャを準備する必要があります。セットアップを確実に成功させるには、次の手順に従ってください。
情報の収集とインフラストラクチャの評価
現在の倉庫 IT セットアップを評価します。倉庫管理システム、ワイヤレス ネットワーク、およびシステム インターフェイスを確認してください。この評価は、適切な無人搬送車を選択し、スムーズな運用に必要なアップグレードを特定するのに役立ちます。
プロセスを定義する
すべての運用プロセスを計画します。リアルタイム シミュレーションまたは CAD レイアウトを使用して、移動ルート、車両の特性、充電ステーションを計画します。このステップにより、agv がワークフローにシームレスに適合するようになります。
実装の準備
agv ソフトウェアをインストールしてテストします。マスターコンピュータとPLCインターフェースをプログラムします。電気配線、信号ユニット、ナビゲーション反射板を設置して物理的環境を準備します。これらの準備により、AGV の強固な基盤が作成されます。
オンサイトでの設置と統合
agv の操作、安全性、トラブルシューティングについてオペレーターと主要ユーザーをトレーニングします。機能テストを実施し、移動経路を微調整します。 AGV をコンベア技術やその他の自動化システムと統合して、スムーズな材料の流れを確保します。
操作の開始 始動
支援を使用して試運転段階を開始します。オペレータの懸念事項に対処し、品質評価を実行します。このフェーズは、問題を早期に発見して解決するのに役立ちます。
ヒント: 継続的なメンテナンスとサポートを計画してください。信頼性の高い 24 時間年中無休のサポートにより、AGV の継続的な運用が保証され、ダウンタイムが最小限に抑えられます。
パイロット テストは、本格的な展開の前に、AGV のパフォーマンスと信頼性を検証するのに役立ちます。あなたがすべき:
初期テストを実行して、ナビゲーションの精度と障害物の検出を確認します。
agv と倉庫管理システムの間の通信をテストします。
AGV がコンベヤーや保管ユニットなどの他の自動化システムとどのように相互作用するかを監視します。
タスクの完了時間、ルート効率、バッテリー使用量を評価します。
オペレーターからフィードバックを収集し、必要に応じてワークフローを調整します。
構造化されたパイロットフェーズにより、業務に影響を与える前に問題を特定して修正できます。テレマティクスとフリート管理ソフトウェアを使用して、AGV パフォーマンスを追跡し、使用状況統計を収集します。
テストエリア |
確認すべきこと |
なぜそれが重要なのか |
|---|---|---|
ナビゲーションの精度 |
経路追従、障害物回避 |
衝突や遅延を防ぐ |
システム通信 |
WMSや他のシステムとのデータ交換 |
スムーズなタスクの実行を保証します |
タスクのパフォーマンス |
速度、耐荷重、バッテリー寿命 |
業務効率を確認 |
オペレーターのフィードバック |
使いやすさ、安全性、ワークフローの統合 |
ユーザーの受け入れを向上させる |
注: テスト可能な要件を設計し、故障モード影響分析 (FMEA) を使用して潜在的な故障を予測します。このアプローチは、欠陥が発生する前に防ぐのに役立ちます。
インストールとテスト中に、問題が発生する場合があります。効果的なトラブルシューティングにより、AGV が一貫した結果を確実に提供します。一般的な戦略には次のようなものがあります。
パス定義をチェックして、ナビゲーション エラーや到達不能な目的地を解決します。
ルーティング アクセシビリティ視覚化ツールを使用して、パス リンクの切れ目を特定します。
制御エリアを管理するために、近接交差点用の特別な累積タイプを作成します。
複雑な交差点での蓄積を無効にし、交通の衝突を防ぐために制御エリアの割り当て解除のタイミングを調整します。
フリート マネージャー ソフトウェアまたは SCADA システムを使用したリアルタイム監視により、問題を迅速に検出して解決します。
使用状況統計を追跡して、繰り返し発生するエラーを特定し、システムのパフォーマンスを評価します。
ニーズの変化に応じてプロジェクトを変更して、車両ルートやピック/ドロップ場所を追加または調整します。
ホイールやセンサーなどのAGVコンポーネントの定期メンテナンスのスケジュールを設定します。
ヒント: マルチブランドのフリート管理プラットフォームを選択して、将来の拡張を計画します。このアプローチにより、AGV フリートをスケールアップする際の複雑さとリスクが軽減されます。
これらの手順に従うことで、無人搬送車が施設にスムーズに統合されるようになります。慎重なセットアップ、徹底的なパイロット テスト、プロアクティブなトラブルシューティングにより、信頼性が高く、効率的で安全な agv 運用を実現できます。
AGV の安全かつ効率的な操作を保証するには、堅牢なトレーニング プログラムが必要です。システム監督者、直接オペレーター、ワークスペースを共有する人間の作業者など、さまざまな役割に合わせてトレーニングを調整します。操作手順、診断、トラブルシューティング、ソフトウェア インターフェイスの使用などの重要なトピックを取り上げます。オンボーディングとオリエンテーションは、新入社員が高度なマテリアル ハンドリングと AGV を理解するのに役立ちます。シミュレーションや実機の使用を含む実践的なセッションにより、自信と実践的なスキルが身に付きます。強力な安全トレーニングでは、危険の特定、リスク評価、PPE の適切な使用、緊急対応、および AGV の安全な操作に取り組む必要があります。定期的な更新コースと安全チェックにより、全員が常に最新情報を入手できます。 OEM が提供するトレーニングにより、特定の AGV に関する正確な指導を受けることができます。知識の保持、職場でのパフォーマンス、安全事故の削減を追跡することで、トレーニングの効果を測定します。
ヒント: 継続的な学習と知識共有の文化を育み、チームの関与と情報の共有を維持します。
AGV を操作するときは、厳格な安全プロトコルに従う必要があります。まずはOSHAおよびANSI/ITSDF規格に準拠することから始めます。危険ゾーンと立ち入り禁止ゾーンを標識、ストライプ、ライトで明確にマークします。これらのゾーンを認識し、リスクを理解できるようにすべての担当者を訓練します。死角で音響および視覚アラームを使用して、AGV の接近を人間の作業者に警告します。衝突を防ぐために、両側に 0.5 メートルなどの最小ガイドパス クリアランスを維持してください。常にメーカーのガイドラインに従って、許可された担当者のみがメンテナンスや修理を行う必要があります。 AGV に 360° 衝突回避システム、緊急停止ボタン、安全性評価センサーを装備します。これらの機能は事故を防止し、確実な動作を保証します。警戒を続ける、安全な距離を保つ、安全装置を決して無効にしないなど、安全な行動を奨励します。
高度なテクノロジーと明確なコミュニケーションを活用することで、AGV と人間の作業者のコラボレーションを最適化できます。 AGV は 360° センサーを使用して障害物を検出し、人が近づきすぎると停止するため、安全な対話が可能になります。リアルタイムのデータ交換により、動的なルート計画とワークフローの最適化がサポートされます。人間の作業者は適応性と意思決定スキルをもたらし、AGV は反復的で肉体的に負担のかかるタスクを処理します。このパートナーシップにより、疲労と怪我のリスクが軽減されます。商品から個人へのワークフローなどの共同システムにより、効率と精度が向上します。 AGV を他のロボットや倉庫システムと統合すると、バランスの取れた運用とよりスマートなワークフローが生まれます。スケジュールとリアルタイムの位置データを使用して人の動きを予測することで、AGV がルートを調整できるようになり、安全性と生産性がさらに向上します。
慎重な計画と段階的なスケーリングを持って、本番稼働フェーズに取り組む必要があります。まずはオンサイトでの設置と統合から始めます。ナビゲーション環境を測定し、ネットワークを完全に統合し、すべてのシステムをテストします。 AGV の操作と安全性について従業員をトレーニングします。ライブ運用中にルートをテストし、逸脱を修正することで AGV を微調整します。
オペレーター向けの立ち上げ支援からコミッショニング段階を開始します。実地研修を提供し、懸念事項に対処します。担当者と AGV 間のスムーズなやり取りを確保します。自動化システムの品質評価を行ってこのフェーズを完了します。
発売後も継続的なサポートを維持します。 AGV の専門家が常駐する 24 時間年中無休のホットライン、リモート トラブルシューティング、必要に応じてオンサイト修理を提供します。このサポートにより、システムの信頼性が維持され、ダウンタイムが最小限に抑えられます。
打ち上げ後は、AGV のパフォーマンスを注意深く監視する必要があります。製造実行システム (MES) により、車両の位置、タスクの進行状況、バッテリー レベル、メンテナンス ステータスをリアルタイムで把握できます。
MES プラットフォームを使用すると、ライブ データに基づいて介入、タスクのルート変更、優先順位の調整を行うことができます。フリート管理システム (FMS) とロボット制御システム (RCS) は、タスク、ルート、センサー データを調整してフリートの運用を最適化します。
ダッシュボードを使用して、効率の向上、転送速度、アイドル時間、バッテリー管理を追跡できます。 VDA 5050、OPC UA、MQTT などの通信規格により、システム間の安全なデータ交換が保証されます。
ヒント: Web ベースの視覚化ツールを使用して AGV とロボットをリアルタイムで監視すると、問題を迅速に発見し、業務をスムーズに実行し続けることができます。
効率と生産性を最大化するには、継続的な改善に重点を置く必要があります。マテリアル ハンドラーの標準作業を開発し、AGV の予測可能なルートを作成します。プロセスを標準化し、役割を定義し、エリアを秩序正しく保ちます。
完全に導入する前に有人カートを使用して AGV ルートをシミュレーションし、混乱を軽減します。 AGV を ERP および MES システムと統合して、生産を同期し、リアルタイムのフィードバックを取得します。
ナビゲーション テクノロジーをアップグレードして、柔軟なルート変更を可能にし、インフラストラクチャの変更を最小限に抑えます。定期的にパフォーマンス データを確認し、ワークフローを調整して効率を向上させます。
注: 継続的な改善により、システムは変化するニーズに適応し、長期的な価値を提供できるようになります。
AGV 実装に対する構造化されたアプローチに従うことで、永続的なメリットを得ることができます。まずは施設の準備状況を評価し、ワークフローを計画し、チームを参加させることから始めます。 AGV は、従業員の健康状態の向上、信頼性の高い運用、在庫精度の向上などのメリットをもたらします。施設は、メンテナンスの必要性が低く、コストが安定しており、自動化効率が向上していると報告しています。
継続的なスタッフの関与と継続的な改善が、AGV の利点を最大化するのに役立つことを忘れないでください。今こそ、貴社の準備状況を評価し、施設内での agv の利点を最大限に活用する時期です。
無人搬送車は、センサーやマーカーを使用して固定ルートをたどります。自動運転車は高度なナビゲーションを使用し、環境の変化に適応できます。予測可能なタスクには AGV 車両を使用します。自律型フォークリフトとロボットがダイナミックな作業を処理します。
API またはミドルウェアを使用して、無人搬送車を WMS または ERP に接続できます。 AGV 車両は、自動運転車や自動フォークリフトとデータを共有します。統合により、タスク管理と在庫の精度が向上します。
スタッフを訓練し、安全ゾーンをマークし、衝突回避システムを使用する必要があります。無人搬送車やAGVは定期的なメンテナンスが必要です。自動運転車や自動フォークリフトには緊急停止ボタンと警告灯が必要です。
荷物のサイズ、ルートの複雑さ、ワークフローのニーズに基づいて無人搬送車を選択します。自律型フォークリフトは、柔軟なタスクに最適です。 AGV 車両は固定ルートに適しています。自動運転車は、変化する環境に対応する高度なナビゲーションを提供します。
センサー、ホイール、バッテリーを定期的に検査します。 AGV 車両にはソフトウェアのアップデートと安全性チェックが必要です。自動運転車と自動フォークリフトには診断と校正が必要です。予防メンテナンスによりダウンタイムが削減され、信頼性が向上します。

























